


-
 07 /2021.05
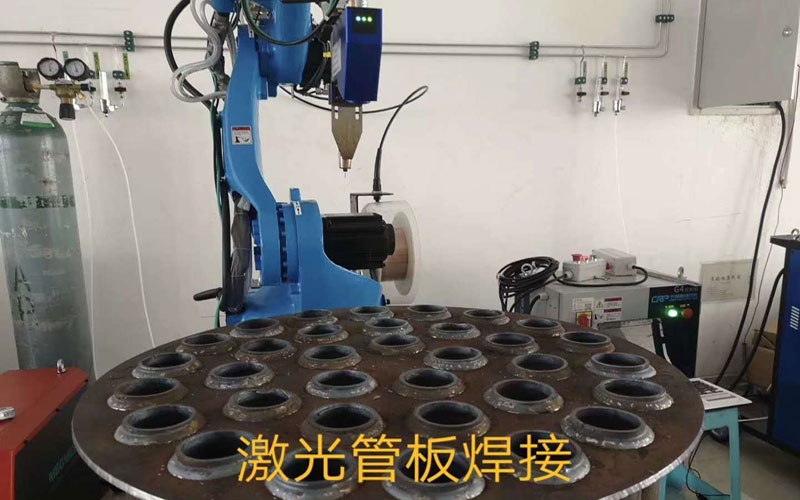
07 /2021.05管板焊接變形應(yīng)如何控制
管板焊接變形的原因筒體與管板焊接的橫向收縮變形在厚度方向上的不均勻分布是導(dǎo)致管板焊接變形的主要原因;管板與筒體的焊縫一般為單面單邊v型坡口,在焊接時,焊縫的背面
-
 13 /2021.05
13 /2021.05焊接機器人在汽車領(lǐng)域的應(yīng)用
隨著中國在國際上的影響力越來越大,各個國際汽車巨頭看中中國巨大的汽車市場,紛紛在中國各地投資建廠,汽車制造商為了擴大品牌占有率和汽車銷售,會對原有廠房或生產(chǎn)線進(jìn)
-
 13 /2021.05
13 /2021.05青島伊唯特來告訴你工業(yè)機器人的4種控制方式
工業(yè)機器人的控制方式目前市場上使用最多的機器人當(dāng)屬工業(yè)機器人,也是最成熟完善的一種機器人,而工業(yè)機器人能得到廣泛應(yīng)用,得益于它擁有有多種控制方式,按作業(yè)任務(wù)的不
-
 07 /2021.05
07 /2021.05氬弧焊燒穿和未焊透產(chǎn)生的原因及防止措施
一、燒穿在焊接過程中,熔化金屬自坡口背面流出形成穿孔的缺陷,稱為燒穿。氬弧焊燒穿產(chǎn)生的原因1、焊接電流過大2、熔池溫度過高3、根部間隙過大4、送絲不及時5、焊接
-
 07 /2021.05
07 /2021.05電阻焊接技術(shù)優(yōu)缺點分析
電阻焊是將被焊工件壓緊于兩電極之間,并通以電流,利用電流流經(jīng)工件接觸面及鄰近區(qū)域產(chǎn)生的電阻熱將其加熱到熔化或塑性狀態(tài),使之形成金屬結(jié)合的一種方法。點焊時,工件只
-
 07 /2021.05
07 /2021.05工業(yè)視覺
1.工業(yè)視覺的定義和優(yōu)勢機器視覺是采用機器代替人眼來做測量與判斷,其功能不僅局限于通過計算機攝取圖像接收信息,也包括對信息的處理和判斷,實現(xiàn)人眼視覺的延伸。作為
-
 07 /2021.05
07 /2021.05焊接機器人的優(yōu)點
目前,中國經(jīng)濟(jì)正處于從“高速度發(fā)展”邁進(jìn)“高質(zhì)量發(fā)展”階段,對制造業(yè)提出了更高更新的要求。憑借生產(chǎn)操作穩(wěn)定、改善勞動環(huán)境、減輕勞動強度、提高勞動生產(chǎn)率等特點,工
-
 07 /2021.05
07 /2021.05等離子弧與氬弧到底有哪些不同
等離子弧焊與氬弧焊的相同點是都利用氬氣進(jìn)行保護(hù),并將氬氣電離形成電弧進(jìn)行焊接。但他們又有很大的不同,最大的不同點是:氬弧焊是利用鎢極與工件直接起弧進(jìn)行焊接,這樣
于我們")

